首页 > 基础资料 博客日记
【手把手教学】RoboSense E1R 固态激光雷达 Windows 可视化连接全攻略
2026-04-09 23:00:01基础资料围观1次
文章【手把手教学】RoboSense E1R 固态激光雷达 Windows 可视化连接全攻略分享给大家,欢迎收藏极客资料网,专注分享技术知识
前言
RoboSense E1R 是一款高性能的固态激光雷达,采用 Flash 扫描方式,拥有 120° x 90° 的超大视场角。对于初学者来说,拿到雷达后的第一步就是将其连接到电脑并看到点云画面。本文将带你走过从硬件接线到软件显示的每一个微小细节,解决“Ping 得通却没画面”、“绿灯闪烁”等常见坑点。

一、 硬件准备
在开始之前,请确保你拥有以下配件:
- RoboSense E1R 雷达主体
- 接口盒(Interface Box):由于雷达使用的是车载以太网接口,必须通过接口盒转接为普通网口。
- 电源适配器:电压要求 9V - 16V(建议使用 12V 2A 的直流电源,接口为标准 DC 5.5-2.1)。
- 网线:超五类或六类网线一条。
- Windows 电脑(建议 Win10 或 Win11)。
- 其他必要接线(商家会一起提供)

二、 第一步:物理连接
物理连接的顺序建议如下,以保护精密电子元件:
- 雷达连接:将雷达自带的大型 TE 弯插头接入接口盒的对应接口,确保插紧。
- 网络连接:用网线连接接口盒的 RJ45 网口和电脑的网口。
- 电源接入:最后接入电源适配器。
- 现象观察:接口盒上的绿色指示灯会亮起。
- 注意:如果绿灯在闪烁,通常代表雷达正在进行高频数据传输,属于正常现象。
![在这里插入图片描述]()

接线如上图所示,一根连线变代表实物的一根连线
三、 第二步:电脑网络配置(核心环节)
雷达和电脑通讯的前提是:它们必须在同一个网段,且 IP 地址必须匹配雷达的发送目标。
- 雷达默认信息:
- 雷达静态 IP:
192.168.1.200 - 雷达发送目标 IP:
192.168.1.102(雷达默认只会把数据发给.102这个地址)。
- 雷达静态 IP:
- 设置电脑 IP:
-
打开:
控制面板->网络和共享中心->更改适配器设置。
![在这里插入图片描述]()
![在这里插入图片描述]()
![在这里插入图片描述]()
-
右键点击你的以太网卡,选择
属性。
![在这里插入图片描述]()
![在这里插入图片描述]()
-
双击
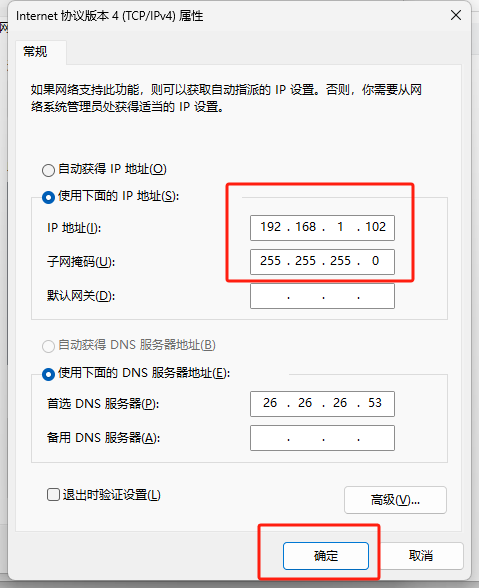
Internet 协议版本 4 (TCP/IPv4)。 -
选择“使用下面的 IP 地址”:
- IP 地址:手动输入
192.168.1.102(必须是这个地址)。 - 子网掩码:输入
255.255.255.0。
- IP 地址:手动输入
-
点击确定保存。
-
![在这里插入图片描述]()
-





四、 第三步:连通性验证(Ping 测试)
在打开软件前,先确认物理链路是否通畅:
- 按下键盘
Win + R,输入cmd回车。 - 输入命令:
ping 192.168.1.200。 - 结果判断:
- 如果显示“来自 192.168.1.200 的回复”,说明连接成功。
- 如果显示“请求超时”,请检查网线和电脑 IP 是否设置正确。
显示如下就是成功
C:\Users\Z>ping 192.168.1.200
正在 Ping 192.168.1.200 具有 32 字节的数据:
来自 192.168.1.200 的回复: 字节=32 时间=1ms TTL=255
来自 192.168.1.200 的回复: 字节=32 时间<1ms TTL=255
来自 192.168.1.200 的回复: 字节=32 时间=3ms TTL=255
来自 192.168.1.200 的回复: 字节=32 时间<1ms TTL=255
192.168.1.200 的 Ping 统计信息:
数据包: 已发送 = 4,已接收 = 4,丢失 = 0 (0% 丢失),
往返行程的估计时间(以毫秒为单位):
最短 = 0ms,最长 = 3ms,平均 = 1ms
五、 第四步:环境清理(关闭防火墙)
这是 90% 的用户收不到点云的原因:Windows 防火墙拦截了 UDP 数据包。
- 进入
控制面板->系统和安全->Windows Defender 防火墙。 - 点击左侧
启用或关闭 Windows Defender 防火墙。 - 将专用网络和公用网络下的防火墙全部选择“关闭”。
- 点击确定(测试完成后可重新开启,但在调试雷达时必须关闭)。
六、 第五步:使用 RSView 实现可视化
-
下载软件:前往 RoboSense 官网资源中心 下载最新版本的 RSView。
![在这里插入图片描述]()
-
解压注意:解压路径中严禁出现任何中文字符,否则软件无法打开或出错。
-
运行程序:双击
RSView.exe。
![在这里插入图片描述]()
-
配置流:
- 点击菜单栏
File->Open->Sensor Stream。 - Lidar Model(雷达型号):选择 RS-E1。
![在这里插入图片描述]()
![在这里插入图片描述]()
- 点击菜单栏
-
查看点云:点击确定后,你应该能在黑色的 3D 网格空间里看到彩色的点云画面。你可以通过鼠标左键旋转视角,滚轮缩放。
![在这里插入图片描述]()





七、 常见问题排查(Troubleshooting)
- Q: Ping 得通,但 RSView 里是黑屏?
- A: 检查两点:1. 电脑 IP 是否严格设为
192.168.1.102;2. 防火墙是否彻底关闭。
- A: 检查两点:1. 电脑 IP 是否严格设为
- Q: 接口盒绿灯一直闪烁正常吗?
- A: 正常。闪烁通常代表雷达正在以 10Hz 的频率不停向外发送 UDP 点云数据包。
- Q: 雷达外壳很烫手?
- A: E1R 是大功率固态雷达,工作时发热属于正常现象。建议不要在密闭、不通风的环境下长时间运行,且避免手部直接长时间触摸。
八、 结束实验与维护
- 断电顺序:先拔掉接口盒的 DC 电源,再关闭软件。不建议在带电状态下频繁拔插雷达端的 TE 连接器。
- 清洁:若窗口有指纹,使用无尘布蘸取少量酒精轻轻擦拭,切勿用纸巾干擦以免划伤光学镀层。
希望这篇教程能帮你顺利开启 RoboSense E1R 的探索之旅!如果有其他问题,欢迎在评论区留言讨论。
文章来源:https://www.cnblogs.com/ChenAI-TGF/p/19843393
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若内容造成侵权/违法违规/事实不符,请联系邮箱:jacktools123@163.com进行投诉反馈,一经查实,立即删除!
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若内容造成侵权/违法违规/事实不符,请联系邮箱:jacktools123@163.com进行投诉反馈,一经查实,立即删除!
标签:
相关文章
最新发布
- 理解PDF的设计哲学,省下一半的编辑时间
- 告别玄学调参:Agent 稳定落地的核心——Harness Engineering
- 【手把手教学】RoboSense E1R 固态激光雷达 Windows 可视化连接全攻略
- Tailwind CSS 4.2 的真正变化:它正在把一部分前端基础设施直接做进框架
- C#/.NET/.NET Core优秀项目和框架2026年3月简报
- 算法分享01——埃拉托斯特尼算法(埃氏筛)【简单】
- 从“词元”到“符元”:Token 中文名背后的 AI 底层认知之争
- 团结引擎发布抖音小游戏(十万个坑已踩完)
- 【OpenClaw】通过 Nanobot 源码学习架构---(6)Skills
- AScript - C#轻量级动态脚本引擎
点击排行
本站推荐
